Arduino Motor Shield
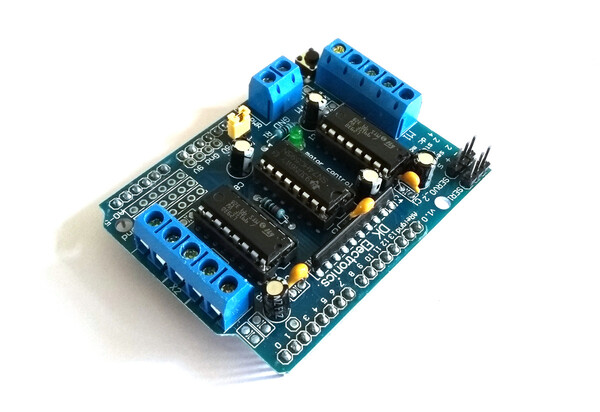
This is a cheap (<4USD) motor shield for Arduino that contains two L293D driver IC, and a 74HCT595N shift register IC.
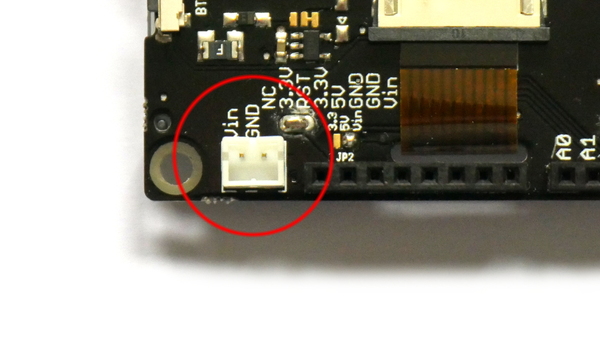
NOTE: Pixl.js is a 3.3V device, and the Arduino Motor Shield is a 5V shield. You need to connect the Vin pin to 5V pin, the jumper shown just right of the red circle. Without this the shield will have the green light shine dimly and do nothing!
Support is provided via the arduino-motorshield (About Modules) module.
First, initialise the module:
var motor = require("arduino-motorshield").connect(); // Pixl.js
var motor = require("arduino-motorshield").connect(require("ArduinoPico")); // Espruino Pico Shim
var motor = require("arduino-motorshield").connect(Nucleo); // Nucleo
Then you can control it simply with motor.set:
// reset to power on state
motor.reset();
// turn drivers on
motor.on();
// set which motors to move
let FORWARD = 0b00100000; // M1A
let BACKWRD = 0b00010000; // M1B
motor.set(FORWARD); // Motor 1 forwards
// M3A, set(0b10000000)
// M2A, set(0b01000000)
// M1A, set(0b00100000)
// M1B, set(0b00010000)
// M2B, set(0b00001000)
// M4A, set(0b00000100)
// M3B, set(0b00000010)
// M4B, set(0b00000001)
Or you can use PWM:
function ramp(direction,durationSec) {
return new Promise(function(resolve, reject) {
// Ramp over a period of durationSec
let steps = durationSec * 100 / 10;
let n = 0;
let animInterval = setInterval(function() {
console.log(new Date().toISOString().substring(11, 22), "ramp",direction, n*100);
n += 1 / steps; // steps
if (n > 1) {
clearInterval(animInterval); //stop function
resolve();
}
if (direction>0) motor.speed(n * 100); // %
if (direction<0) motor.speed(100 - n * 100); // %
}, 100); // every 10 ms
});
}
function motorControl() {
// Define Motors Used and Wiring
// M3A, set(0b10000000)
// M2A, set(0b01000000)
// M1A, set(0b00100000)
// M1B, set(0b00010000)
// M2B, set(0b00001000)
// M4A, set(0b00000100)
// M3B, set(0b00000010)
// M4B, set(0b00000001)
let FORWARD = 0b00100000; // M1A
let BACKWRD = 0b00010000; // M1B
motor.set(FORWARD); // Motor 1 forwards
ramp(1,10).then(()=>{ramp(-1,10);});
//rampUp(rampDown(console.log("fin")));
}
var motor = motorDriver();
motor.reset();
// Call the motor immediately on first run
motorControl();
// Call the motor every n seconds
setInterval(motorControl, 22 * 1000);
Buying
This page is auto-generated from GitHub. If you see any mistakes or have suggestions, please let us know.