Jolt.js LEGO Control
Jolt.js's high power outputs are great for driving LEGO motors.
You might have an old LEGO set with motors you want to drive, or might just want to invest in some motors to power your LEGO constructions. You can connect these to Jolt.js and control them via JS or even the built-in Blockly graphical programming language!
LEGO has gone through several variations of motors over the years, the main ones being:
- 4.5v (retired 1986)
- 9v (retired 2009)
- Power Functions (retired 2018, clones still made)
- Mindstorms / Spike (in production)
- Powered Up (in production)
Very few solutions exist for powering old 4.5v/9v systems, and Jolt.js can power these easily. To make these work, simply cut an extension wire and attach it between any of the H0..7 outputs on the Jolt.
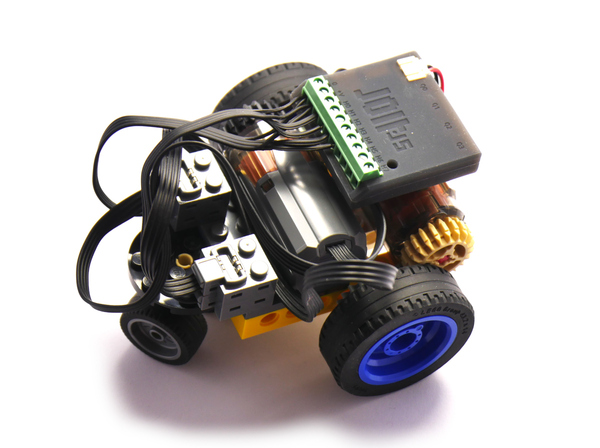
While LEGO Power Functions was officially retired in 2018, a wide variety of clones are available at great prices (around $3) as well as new devices such as micro motors and smoke machines that LEGO never produced. This makes it a great solution for adding power to your LEGO models, and is what we're using here.
Note: Powered Up/Spike/Mindstorms motors can be used too, but these motors have more connections as they can also be inputs. The motors and cables tend to be substantially more expensive to unless you have some already these may not be a good thing to invest in.
Note: If you don't want to mess with hardware at all, we also have the mouldking module
which is able to control some kinds of Bluetooth-capable Power Functions clone hubs.
You'll Need
Wiring
Full details available here but the connections are as follows:
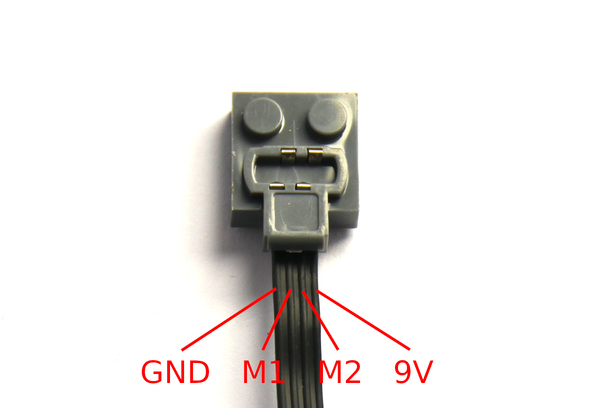
Permanent power is supplied so that the 'servo motor' can return back to its middle position when no motor power is applied.
We'd recommend cutting an extension lead in two, and then connection the two plugs at either end up to Jolt.js:
| Power Functions | Jolt.js |
|---|---|
Plug 1 GND |
Terminal block 0 |
Plug 1 Motor 1 |
Terminal block H0 |
Plug 1 Motor 2 |
Terminal block H1 |
Plug 1 9V |
Terminal block +V |
Plug 2 GND |
Terminal block 0 |
Plug 2 Motor 1 |
Terminal block H2 |
Plug 2 Motor 2 |
Terminal block H3 |
Plug 2 9V |
Terminal block +V |
Software
You should now be able to control a motor attached to the Power Functions plug. You if you set:
H0to0andH1to1, the motor will go one way (eg.digitalWrite([H0,H1], 1);)H0to1andH1to0, the motor will go the other (eg.digitalWrite([H0,H1], 2);)- Setting both to
0or1(eg.digitalWrite([H0,H1], 0);) will stop the motor, but the motor driver will be left on, drawing power. Instead you can set bothH0andH1to inputs withdigitalRead([H0,H1])and the motor driver will turn off. See the Jolt.js page for more information.
You can roll this into one function which will control both motors:
function motor(l,r) {
if (l>0) {
digitalWrite(H1,0);
analogWrite(H0,l);
} else if (l<0) {
digitalWrite(H0,0);
analogWrite(H1,-l);
} else {
digitalRead([H0,H1]);
}
if (r>0) {
digitalWrite(H2,0);
analogWrite(H3,r);
} else if (r<0) {
digitalWrite(H3,0);
analogWrite(H2,-r);
} else {
digitalRead([H2,H3]);
}
}
Note: I've assumed that you might be building a robot where there's a motor on each wheel, so the second motor is set to turn the opposite direction to the first.
Now motor(1,1) will turn both motors on, motor(0,0) will turn both off, or
motor(-1,0.5) will turn the first backward at full power and the second forwards
at half power.
So if you want to queue up one movement after another, you can do something like:
function move(l,r,time) {
return new Promise(resolve => {
motor(l,r);
setTimeout(function() {
motor(0,0);
resolve();
}, time||500);
});
}
move(1,1, 500)
.then(() => move(1,0,200))
.then(() => move(1,1,500))
.then(() => move(1,0,200))
.then(() => move(0.7,0.7,1000))
Programming Graphically (Blockly)
As it's LEGO you might like to let your device be controlled with a graphical
programming language for kids. With Espruino this is easy - all you need to
do is define a function called motor (which we already did) and save it
so it's always loaded by Espruino.
To write the file so it's always loaded with the motor function in,
copy this and paste it into the left-hand side of the IDE.
require("Storage").write(".boot0",`
function motor(l,r) {
if (l>0) {
digitalWrite(H1,0);
analogWrite(H0,l);
} else if (l<0) {
digitalWrite(H0,0);
analogWrite(H1,-l);
} else {
digitalRead([H0,H1]);
}
if (r>0) {
digitalWrite(H2,0);
analogWrite(H3,r);
} else if (r<0) {
digitalWrite(H3,0);
analogWrite(H2,-r);
} else {
digitalRead([H2,H3]);
}
}
`);
Now:
- Up the top of the screen to the right of the lift of files click the
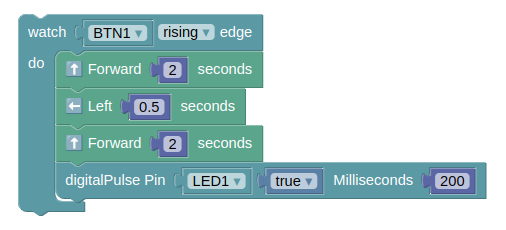
+sign, thenBlockly. You'll see a new graphical programming screen - In the tool area on the left, click
Robot - Now drag
Forward/Backward/Left/Rightblocks from theRobottab onto the screen as needed - Next click
Uploadand your program will be uploaded and will run!
This page is auto-generated from GitHub. If you see any mistakes or have suggestions, please let us know.