
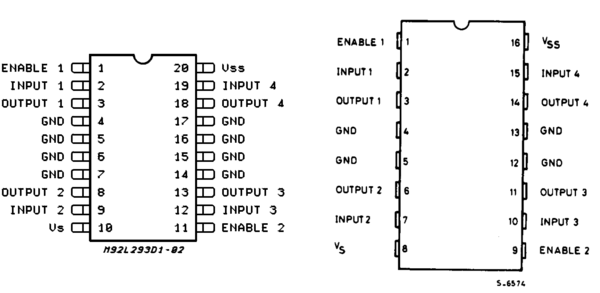
L293D Motor Driver IC
(Datasheet) and product at RS Components
The L293D has four outputs that can sink 600mA, each of which can pull up to a voltage as well as down to 0v. This makes it ideal for driving motors in forwards and reverse, as each side of the motor can be connected to an output. Outputting 0 and 1 will make it turn one way, and outputting 1 and 0 will make it turn the other.
It's available in a few different types, but we're interested in:
- 16 pin DIP package : This is great for BreadBoard or making your own PCBs
- 20 pin SOIC: This can be soldered directly onto the Espruino board
Connections
To use, simply connect as follows:
| Pin | Function | Connect To |
|---|---|---|
| VS | Supply Voltage | Battery Positive, or Bat on the Espruino |
| VSS | Logic Supply Voltage | Bat on the Espruino |
| GND | Ground | Ground on Espruino and Battery |
| ENABLE 1/2 | Enable Outputs | Bat on the Espruino (if you always want them on) |
| INPUT 1/2/3/4 | Logic Inputs | Any logic pin on the Espruino board |
| OUTPUT 1/2/3/4 | Power Outputs | Your Motors/etc |
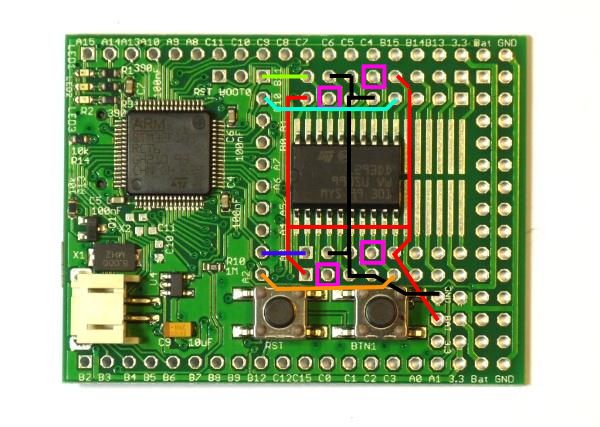
If you're soldering the 20 pin SOIC onto the board, we'd suggest that you connect as follows:
| L293D | Espruino |
|---|---|
| 1 - ENABLE 1 | BAT |
| 2 - INPUT 1 | A3 |
| 3 - OUTPUT 1 | Connect to pin strip |
| 4 - GND | GND |
| 5 - GND | GND |
| 6 - GND | GND |
| 7 - GND | GND |
| 8 - OUTPUT 2 | Connect to pin strip |
| 9 - INPUT 2 | A2 |
| 10 - VS | BAT |
| 11 - ENABLE 2 | BAT |
| 12 - INPUT 3 | B10 |
| 13 - OUTPUT 3 | Connect to pin strip |
| 14 - GND | GND |
| 15 - GND | GND |
| 16 - GND | GND |
| 17 - GND | GND |
| 18 - OUTPUT 4 | Connect to pin strip |
| 19 - INPUT 4 | B11 |
| 20 - VSS | BAT |
That way, every output can have PWM.
Software
To use this, you just need to send a 1 or a 0 out of Espruino. If you've wired up as suggested, the simplest code to turn output 1 on is digitalWrite(A3,1).
However with multiple outputs it's often easier to reference them by number:
var outputs = [A3,A2,B10,B11];
digitalWrite(outputs[0],1); // output 1
digitalWrite(outputs[3],1); // output 4
You can also use analogWrite (using PWM) to turn an output on for half of the time:
var outputs = [A3,A2,B10,B11];
analogWrite(outputs[1], 0.5, { freq: 100 }); // Turn output 2 on, 50% of the time, at 100 Hz
Using



This page is auto-generated from GitHub. If you see any mistakes or have suggestions, please let us know.