Distance Sensing Robot
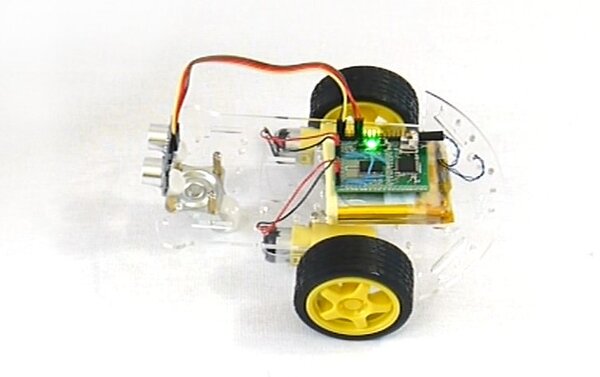
This Robot uses an HC-SR04 Ultrasonic distance sensor, an Espruino board with an L293D motor driver IC soldered onto the surface mount prototyping area.
Note: This is an older code example that doesn't use the HC-SR04 library.
Wiring Up
Solder the L293D motor driver, and the HC-SR04 Ultrasonic Distance sensor as described on their pages
Connect the motors as follows:
| L293D | Connection |
|---|---|
| OUT1 | Motor 1 Black |
| OUT2 | Motor 1 Red |
| OUT3 | Motor 2 Black |
| OUT4 | Motor 2 Red |
Source Code
var TRIG = A0; // ultrasonic trigger
var ECHO = A1; // ultrasonic echo signal
var MOTORS = [A3,A2,B10,B11]; // pins for the motors
var t1 = 0;
var dist = 0;
var inManouver = false;
// Get the distance from the sensor
setWatch(function(e) { t1=e.time; }, ECHO, { repeat:true, edge:'rising' });
setWatch(function(e) { var dt=e.time-t1; dist = (dt*1000000)/57.0; }, ECHO, { repeat:true, edge:'falling' });
// 20 times a second, trigger the distance sensor
setInterval("digitalPulse(TRIG,1, 10/1000.0)",50);
// reverse, turn, and go forwards again
function backup() {
inManouver = true;
digitalWrite(MOTORS, 5); // back
setTimeout(function() {
digitalWrite(MOTORS, 6); // turn
setTimeout(function() {
inManouver = false;
digitalWrite(MOTORS, 6); // forward again
}, 500);
}, 500);
}
function forward() {
digitalWrite(MOTORS, 10);
}
function stop() {
digitalWrite(MOTORS, 0);
}
function onInit() {
forward();
}
function step() {
// if we detect we're getting too close, turn around
if (dist < 20 && !inManouver)
backup();
}
setInterval(step, 100); // check every 100ms to see if we're too close
onInit(); // start going forwards
This page is auto-generated from GitHub. If you see any mistakes or have suggestions, please let us know.